اپ ورکینگـ اخبار تکنولوژی اخبار تکنولوژی
اپ ورکینگـ اخبار تکنولوژی اخبار تکنولوژی

ثبت بازخورد
- دیجیاتو
- تکنولوژی
- کیان
 تکنولوژی توسعه ربات بالداری که میتواند مانند پرنده فرود بیاید [تماشا کنید]
تکنولوژی توسعه ربات بالداری که میتواند مانند پرنده فرود بیاید [تماشا کنید]
این ربات از سیستم ناوبری و کامپیوتر داخلی و همچنین یک پنجه بهره میبرد و قابلیتهای زیادی را در زمینه رباتیک فراهم میکند.
 نوشته شده توسط جواد تاجی | ۲۹ آذر ۱۴۰۱ | ۲۲:۳۰
نوشته شده توسط جواد تاجی | ۲۹ آذر ۱۴۰۱ | ۲۲:۳۰
در دیجیاتو ثبتنام کنید
جهت بهرهمندی و دسترسی به امکانات ویژه و بخشهای مختلف در دیجیاتو عضو ویژه دیجیاتو شوید.
عضویت در دیجیاتو
تازههای تکنولوژی
- روزیاتو: ۱۲ سریال پساآخرالزمانی برتر تاریخ تلویزیون؛ از The Last Ship تا Y: The Last Man ۴ ساعت قبل
- آلودگی هوای تهران؛ گزارش استارتاپ تیزنگر ۱۲۰ نقطه آلوده پایتخت را به نمایش گذاشت ۴ ساعت قبل
- هدایای ایرانسل برای شب یلدا اعلام شد: شانس خود را برای دریافت اینترنت رایگان امتحان کنید ۶ ساعت قبل
- کارتهای گرافیک سری RTX 50، احتمالاً بزرگترین جهش عملکرد را در تاریخ انویدیا خواهند داشت ۶ ساعت قبل
- ایلان ماسک شرکت در نظرسنجیهای مهم برای تغییر سیاستهای توییتر را به کاربران سرویس بلو محدود میکند ۷ ساعت قبل
ویدئوی مرتبط
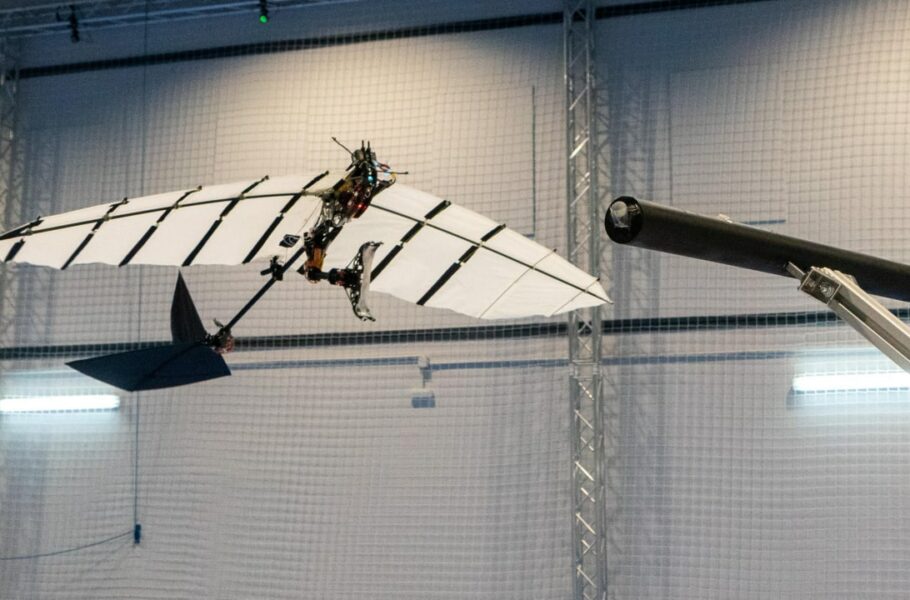
محققان دانشگاه اکول پلیتکنیک فدرال لوزان (EPFL) سوئیس روشی را ابداع کردهاند که به یک ربات بالدار پرنده اجازه میدهد تا با استفاده از مکانیزم شبیه به پنجه، بهطور کاملاً مستقل روی یک سطح افقی فرود بیاید. این نوآوری میتواند بهطور قابلتوجهی دامنه وظایف مربوط با رباتها را گسترش دهد.
«رافائل زوفری»، دانشجوی فوق دکترا آزمایشگاه سیستمهای هوشمند (LIS) و Biorobotics ab (BioRob) در دانشکده مهندسی و محقق اصلی این مقاله، همراه با همکاران خود در دانشگاه دانشگاه سویل، اسپانیا این ربات پرنده ۷۰۰ گرمی را بهعنوان بخشی از پروژه اروپایی GRIFFIN توسعه داده است.
نحوه پرواز و فرود ربات پرنده
او توضیح میدهد:
«این اولین مرحله از یک پروژه بزرگتر است. زمانی که یک ربات پرنده بتواند بهطور مستقل روی شاخه درخت فرود بیاید، آنگاه این پتانسیل را دارد که وظایف خاصی را انجام دهد؛ مانند جمعآوری نمونههای بیولوژیکی یا انجام اندازهگیریهای مربوط به درختان. درنهایت، حتی میتواند روی ساختارهای مصنوعی فرود بیاید که این امر زمینههای کاربردی بیشتری را فراهم خواهد کرد.»
زوفری همچنین توضیح میدهد که این توانایی باعث میشود تا رباتهای پرنده که مانند بسیاری از پهپادها عمر باتری محدودی دارند، دوباره بتوانند با استفاده از انرژی خورشیدی شارژ شوند.
در طول توسعه این ربات، مشکلاتی سد راه مهندسان شده است. به عنوان مثال، ربات پرنده درحین نشستن باید سرعت خود را کاهش دهد و همچنان فرایند پرواز خود را حفظ کند؛ پنجه آن باید بهاندازهای قوی باشد که بتواند سطح را بگیرد و همچنین وزن ربات را تحمل کند.

محققان با تجهیز ربات به یک کامپیوتر کاملاً داخلی و سیستم ناوبری که با یک سیستم ضبط حرکت خارجی برای کمک به تعیین موقعیت خود کامل میشود، موفق شدند تا بر این مشکلات غلبه کنند. پنجه نیز بهگونهای طراحی شده است که حرکت روبهجلوی ربات را در هنگام تماس با سطح درک کند و بتواند با سرعت و شدت قابلقبولی بسته شود تا وزن آن را تحمل کند.
زوفری و همکارانش برای آینده، بهدنبال راههایی هستند تا قابلیتهای ربات پرنده خود را بهبود بخشند و آن را برای استفاده در محیطهای بیرونی و غیرقابل پیشبینیتر ارتقا دهند؛ زیرا آزمایشهای فعلی آن در محیطهای داخلی انجام شده است.
رباتیک
مقالات و اخبار مرتبط
- توسعه رباتی که میتواند خودش را در عرض یک دقیقه ترمیم کند [تماشا کنید]
- دانشمندان MIT در حال ساخت رباتهایی هستند که میتوانند خودشان را بسازند
- این ربات به کمک مایکروسافت کینکت و شبکه عصبی، گلف بازی میکند [تماشا کنید]
- دستاورد دانشمندان بریتانیایی: ساخت ربات کوچک Joey برای شناسایی مشکلات لولههای فاضلاب
- مهندسان ژاپنی ربات عنکبوتی ساختهاند که میتواند لولههای فاضلاب را تعمیر کند [تماشا کنید]
دیدگاهها و نظرات خود را بنویسید
مطالب پیشنهادی
پیشنهادهای دیجیاتو
- شرایط فروش مدیران خودرو؛ فروش فوری محصولات خانواده چری و MVM
- نسل جدید تحریمها علیه ایران؛ آینده اینترنت اشیا و فناوری اطلاعات در خطر است؟
- رئیس مرکز ملی فضای مجازی: عدم پاسخ متا به نامه ایران مقدمهای برای فیلتر قانونی اینستاگرام است
- بررسی سامسونگ گلکسی زد فلیپ ۴؛ گوشی تاشو برای همه
ورود به حساب کاربری

ساخت حساب کاربری

فراموشی رمز عبور